This project has been financed by the Ministry of Economy and Competitiveness of the Government of Spain within the State Program of R+D+i Oriented to the Challenges of Society and co-financed with European Feder funds. The project reference is DPI2013-40534-R and the full title: SIRMAVED: DESARROLLO DE UN SISTEMA INTEGRAL ROBOTICO DE MONITORIZACION E INTERACCION PARA PERSONAS CON DAÑO CEREBRAL ADQUIRIDO Y DEPENDIENTES.
Principal Investigators: Miguel Cazorla and Jose Garcia-Rodriguez
Reference: DPI2013-40534-R
Funded by: Ministerio de Economía y Competitividad
Duration: 2014-2017
Funding: 89.000 €
SIRMAVED is a multisensor system for rehabilitation and interaction of people with motor and cognitive disabilities. The system enables to perform different therapies using multiple modes of interaction (pose, body and hands gestures, voice, touch and gaze position) depending on the type and degree of disability. Through a training process, the system can be customized enabling the definition of patients’ own gestures for each sensor. The system is integrated with a range of applications for rehabilitation. These applications were designed in collaboration with experts from the Hospital of Seville. Examples of these applications are solving puzzles, mazes and text writing using predictive text. The system also provides a flexible and modular framework for the development of new applications focused on new therapies. We are looking for entities and companies interested in commercial agreements, technical assistance or technical cooperation.
Motivation
According to WHO, there are more than one billion people with some kind of disability in the world and about 200 million experience considerable difficulties. In the coming years, an increased number of disabled people is expected, which is a cause of major concern. Mainly, this is because of aging, the increased risk of disability among the elderly and the global increase in chronic diseases such as diabetes, cardiovascular disease, cancer and disorders of mental health.
Among others, devices and assistive technologies increase mobility, hearing, vision and communication possibilities of disabled people. Therefore, using these technologies, they can improve their skills being able to live autonomously and participate in our society.
Nowadays, there is a wide variety of devices to carry out the rehabilitation of disabled people using new technologies. For example, there are gloves-based devices that enable an accurate representation of the hand movements or gestures. However, these systems are invasive, preventing natural interaction with patient free movements. Moreover, there are other less invasive systems based on 3D sensors to obtain the pose of patients and used for injury rehabilitation. However, these systems are constrained to high-level interaction gestures limiting therefore its application to rehabilitation therapies for patients with minor disabilities or very limited mobility. We can also find systems capable of tracking the position of the eyes, despite their use in rehabilitation therapy is still very limited by requiring a very restricted position of the patient in terms of distance and position with respect to the sensor. There are also other systems based on the use of multiple sensors but they are still unable to solve a set of problems that the presented system faces.
System Overview
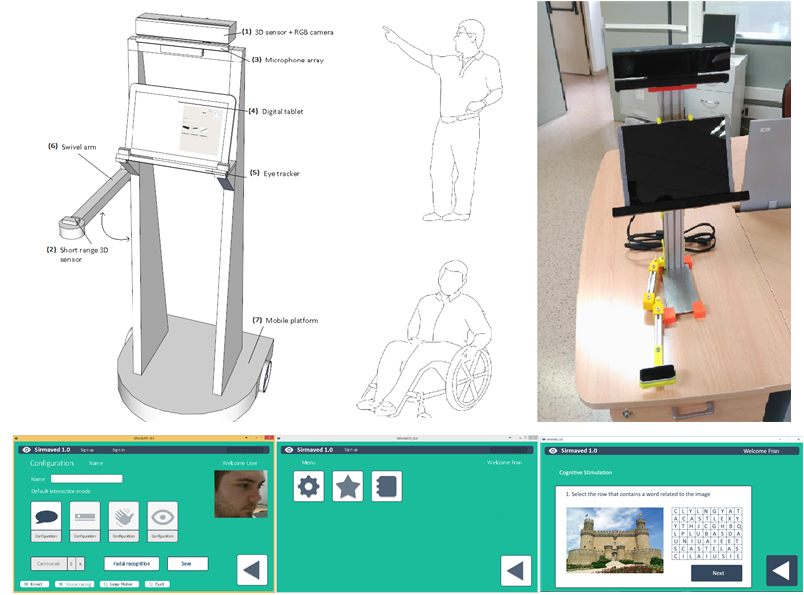
The system is capable of providing natural interaction to disabled people, performing motor and cognitive rehabilitation therapies. In this way, the system offers a new approach making an efficient use of new technologies and human-machine interaction sensors. The system combines the use of various sensors. A long range sensor (3D camera) that enables user identification and interaction with the system through gestures or patient own pose. This sensor also provides depth information of the scene, enabling to locate precisely the patient operation environment. The data obtained by the long-range sensor can be combined with the use of another short-range 3D sensor that provides a precise virtual representation of users’ hands. This information is used and combined with information from other sensors to perform rehabilitation therapies requiring precise movements of hands, a pose or certain fingers gestures. This sensor is located on a swivel arm, enabling its use when needed. Also, the system incorporates a gaze tracking sensor capable of obtaining the patient’s gaze position (eye tracking). This sensor is calibrated for each patient to find out the position of the patient’s eyes regarding user interfaces displayed on the tablet screen.
The sensors mentioned above are combined with a microphone array, enabling to capture users’ voice commands, and sound information from the environment. Finally, all sensors are connected to a digital tablet that processes sensors data and offers other means of additional interaction: interaction by contact. This mode of interaction also enables rehabilitation therapies or communication based on patient contact with the interfaces displayed on the tablet screen.
All components are mounted on a mobile platform (prototype) forming a complete system for natural interaction. The system is intended for performing therapies with patients with different disabilities.
Regarding the mode of operation, the system provides a framework for developing applications that enables rehabilitation or user communication through various human-machine interfaces. Initially, the system identifies a user in the environment leaving settings adjusted to patient’s requirements and characteristics according to their disability. This task can be carried out with a therapist or caregiver assistant who registers the user and trains the system for that patient. The system receives gestural data as input and translates it to basic commands (up, down, left, right, etc.). In addition, the system enables patient’s own gestures customization for each patient and sensor. Thereby, the creation of a different set of poses, gestures with the body, arms, head, hand, eye movement and precise hand movements (finger movements) or voice commands are possible to carry out the same actions on the system. Through these actions the user can navigate the environment, options, applications, etc., to perform rehabilitation or specific communication with a specific application.
Each patient can be recognized in the system using biometric identification (facial recognition) and can also define a set of sensors and a set of custom gestures to be used depending on the type of disability. Through this customization and the proper sensors calibration, the system ensures the best user adaptation offering the most natural interface.
The system includes a set of applications enabling both interaction and patient rehabilitation. In particular, several applications taking the basic commands as input have been developed: predictive text application (convert text to speech); application motor rehabilitation (through virtual object manipulation) and cognitive rehabilitation (through guided drawing). However, this initial set of applications is extensible and adaptable according to the different needs of patients. In this way, the system provides a flexible and modular workspace for new therapies development.
First prototype of this technology has been deployed in a Hospital (Seville, Spain). Currently, doctors are evaluating and testing this system to see how patients can use it for rehabilitation. The plan is also to deliver some of these platforms to patients houses, so they can continue the rehabilitation process at home with the help of some family members.
Main Advantages and Innovative Aspects of Our Technology
- Allows to perform interactively and custom rehabilitation therapies for people with different motor and cognitive disabilities.
- Enables multiple modes of interaction (gestures, poses / hand movement, voice, eye gaze, and touch) for people with different disabilities offering significant advantages over other systems.
- Enables customization of patient own gestures for each sensor providing a natural and custom interaction experience with the system.
- Provides biometric identification (facial recognition) adapting the interaction (profiles) depending on the user disability level.
- Combines the data obtained from the sensors with 3D interfaces. The system provides a more realistic way of rehabilitation through the use of advanced virtual reality techniques.
- It provides a flexible and modular workspace for the development of new applications oriented to new therapies based on the different needs of the patients.
- Uses sensors and devices available on the market, therefore, can be modified, adapted and replicated easily at a reasonable cost depending on the type of patient, disabilities and therapies to implement.
- Provides a mobile platform that can be used by patients at home.
Press Coverage
Team
- Miguel Cazorla (PI)
- José García Rodríguez (PI)
- Domingo Gallardo
- María Isabel Alfonso
- Diego Viejo
- Antonio Botía
- Vicente Matellán (Universidad de León)
- José María Cañas (Universidad Rey Juan Carlos)
- Francisco Martín (Universidad Rey Juan Carlos)
- Cristina Suárez (Hospital Virgen del Rocío de Sevilla)
Publications
2016
-
Martinez-Gomez, Jesus and Morell, Vicente and Cazorla, Miguel and Garcia-Varea, Ismael. Semantic Localization in the PCL library. Robotics and Autonomous Systems (2016).
[ BibTeX ]
@article{Martinez2016ras, title = {Semantic Localization in the PCL library}, journal = {Robotics and Autonomous Systems}, volume = {75}, pages = {641-648}, year = {2016}, author = {Martinez-Gomez, Jesus and Morell, Vicente and Cazorla, Miguel and Garcia-Varea, Ismael} } -
Garcia-Garcia, Alberto and Orts-Escolano, Sergio and Oprea, Sergiu and Garcia-Rodriguez, Jose and Azorin-Lopez, Jorge and Saval-Calvo, Marcelo and Cazorla, Miguel. Multi-sensor 3D Object Dataset for Object Recognition with Full Pose Estimation. Neural Computing and Applications (2016).
DOI: http://dx.doi.org/doi:10.1007/s00521-016-2224-9
[ BibTeX ]
@article{Garcia2016, title = {Multi-sensor 3D Object Dataset for Object Recognition with Full Pose Estimation}, journal = {Neural Computing and Applications}, volume = {Accepted}, year = {2016}, doi = {http://dx.doi.org/doi:10.1007/s00521-016-2224-9 }, author = {Garcia-Garcia, Alberto and Orts-Escolano, Sergio and Oprea, Sergiu and Garcia-Rodriguez, Jose and Azorin-Lopez, Jorge and Saval-Calvo, Marcelo and Cazorla, Miguel} } -
Rangel, Jose Carlos and Cazorla, Miguel and Garcia-Varea, Ismael and Martinez-Gomez, Jesus and Fromont, Elisa and Sebban, Marc. Scene Classification from Semantic Labeling. Advanced Robotics (2016).
DOI: 10.1080/01691864.2016.1164621
[ BibTeX ]
@article{Rangel2016, title = {Scene Classification from Semantic Labeling}, journal = {Advanced Robotics}, volume = {30}, number = {11-12}, pages = {758-769}, year = {2016}, note = {}, doi = {10.1080/01691864.2016.1164621}, author = {Rangel, Jose Carlos and Cazorla, Miguel and Garcia-Varea, Ismael and Martinez-Gomez, Jesus and Fromont, Elisa and Sebban, Marc} } -
. Evaluation of sampling method effects in 3D non-rigid registration. Neural Computing and Applications (2016).
DOI: http://dx.doi.org/doi:10.1007/s00521-016-2258-z
[ BibTeX ]
@article{Saval2016, title = {Evaluation of sampling method effects in 3D non-rigid registration}, journal = {Neural Computing and Applications}, volume = {Accepted}, number = {}, pages = {}, year = {2016}, note = {}, doi = {http://dx.doi.org/doi:10.1007/s00521-016-2258-z}, author = {} } -
Orts-Escolano, S. and Garcia-Rodriguez, J. and Morell, V. and Cazorla, Miguel and Serra-Perez, J.A. and Garcia-Garcia, A.. 3D surface reconstruction of noisy point clouds using Growing Neural Gas. Neural Processing Letters (2016).
DOI:
[ BibTeX ]
@article{Orts2016b, title = {3D surface reconstruction of noisy point clouds using Growing Neural Gas}, journal = {Neural Processing Letters}, volume = {43}, number = {2}, pages = {401-423}, year = {2016}, note = {}, issn = {1370-4621}, doi = {}, author = {Orts-Escolano, S. and Garcia-Rodriguez, J. and Morell, V. and Cazorla, Miguel and Serra-Perez, J.A. and Garcia-Garcia, A.} } -
Azorín, Jorge and Saval, Marcelo and Fuster, Andrés and Garcia-Rodriguez, Jose. A novel prediction method for early recognition of global human behaviour in image sequences. Neural Processing Letters (2016).
DOI: 10.1007/s11063-015-9412-y
[ BibTeX ]
@article{Azorin2016b, title = {A novel prediction method for early recognition of global human behaviour in image sequences}, journal = {Neural Processing Letters}, volume = {43}, number = {2}, pages = {363-387}, year = {2016}, note = {}, doi = {10.1007/s11063-015-9412-y}, author = {Azorín, Jorge and Saval, Marcelo and Fuster, Andrés and Garcia-Rodriguez, Jose} } -
Garcia-Garcia, Alberto and Gomez-Donoso, Francisco and Garcia-Rodriguez, Jose and Orts-Escolano, Sergio and Cazorla, Miguel and Azorin-Lopez, Jorge. PointNet: A 3D Convolutional Neural Network for Real-Time Object Class Recognition. The IEEE World Congress on Computational Intelligence 2016 (2016).
[ BibTeX ]
@inproceedings{Garcia2016a, author = {Garcia-Garcia, Alberto and Gomez-Donoso, Francisco and Garcia-Rodriguez, Jose and Orts-Escolano, Sergio and Cazorla, Miguel and Azorin-Lopez, Jorge}, booktitle = {The IEEE World Congress on Computational Intelligence 2016}, title = {PointNet: A 3D Convolutional Neural Network for Real-Time Object Class Recognition}, year = {2016} } -
Rangel, José Carlos and Morell, Vicente and Cazorla, Miguel and Orts-Escolano, Sergio and García-Rodríguez, José. Object recognition in noisy RGB-D data using GNG. Pattern Analysis and Applications (2016).
[ BibTeX ]
@article{Rangel2016paaa, title = {Object recognition in noisy RGB-D data using GNG}, journal = {Pattern Analysis and Applications}, year = {2016}, author = {Rangel, José Carlos and Morell, Vicente and Cazorla, Miguel and Orts-Escolano, Sergio and García-Rodríguez, José} } -
Gomez-Donoso, Francisco and Cazorla, Miguel and Garcia-Garcia, Alberto and García-Rodríguez, José. Automatic Schaeffer’s Gestures Recognition System. Expert Systems (2016).
[ BibTeX ]
@article{Gomez-Donoso2016, title = {Automatic Schaeffer's Gestures Recognition System}, journal = {Expert Systems}, volume = {33}, number = {5}, pages = {480--488}, year = {2016}, author = {Gomez-Donoso, Francisco and Cazorla, Miguel and Garcia-Garcia, Alberto and García-Rodríguez, José} } -
Rodriguez, Angel and Gomez-Donoso, Francisco and Martinez-Gomez, Jesus and Cazorla, Miguel. Building 3D maps with tag information. XVII Workshop en Agentes Físicos (WAF 2016) (2016).
[ BibTeX ]
@inproceedings{Rodriguez2016, author = {Rodriguez, Angel and Gomez-Donoso, Francisco and Martinez-Gomez, Jesus and Cazorla, Miguel}, title = {Building 3D maps with tag information}, booktitle = {XVII Workshop en Agentes Físicos (WAF 2016)}, year = {2016} } -
Garcia-Garcia, Albert and Orts-Escolano, Sergio and Garcia-Rodriguez, Jose and Cazorla, Miguel. Interactive 3D object recognition pipeline on mobile GPGPU computing platforms using low-cost RGB-D sensors. Journal of Real-Time Image Processing (2016).
DOI: 10.1007/s11554-016-0607-x
[ BibTeX ]
@article{Garcia2016RTIP, title = {Interactive 3D object recognition pipeline on mobile GPGPU computing platforms using low-cost RGB-D sensors}, journal = {Journal of Real-Time Image Processing}, year = {2016}, doi = {10.1007/s11554-016-0607-x}, author = {Garcia-Garcia, Albert and Orts-Escolano, Sergio and Garcia-Rodriguez, Jose and Cazorla, Miguel} } -
Orts-Escolano, Sergio and Garcia-Rodriguez, Jose and Cazorla, Miguel and Morell, Vicente and Azorin, Jorge and Saval, Marcelo and Garcia-Garcia, Alberto and Villena, Victor. Bioinspired Point Cloud Representation: 3D object tracking. Neural Computing and Applications (2016).
DOI: http://dx.doi.org/doi:10.1007/s00521-016-2585-0
[ BibTeX ]
@article{Orts-Escolano2016NCAA, title = {Bioinspired Point Cloud Representation: 3D object tracking}, journal = {Neural Computing and Applications}, year = {2016}, doi = {http://dx.doi.org/doi:10.1007/s00521-016-2585-0}, author = {Orts-Escolano, Sergio and Garcia-Rodriguez, Jose and Cazorla, Miguel and Morell, Vicente and Azorin, Jorge and Saval, Marcelo and Garcia-Garcia, Alberto and Villena, Victor} } -
Angelopoulou, Anastassia and Rodriguez, Jose Garcia and Orts-Escolano, Sergio and Gupta, Gaurav and Psarrou, Alexandra. Fast 2D/3D Object Representation with Growing Neural Gas. Neural Computing and Applications (2016).
DOI: http://dx.doi.org/doi:10.1007/s00521-016-2579-y
[ BibTeX ]
@article{Angelopoulou2016NCAA, title = {Fast 2D/3D Object Representation with Growing Neural Gas}, journal = {Neural Computing and Applications}, volume = {Accepted}, number = {}, pages = {}, year = {2016}, note = {}, doi = {http://dx.doi.org/doi:10.1007/s00521-016-2579-y}, author = {Angelopoulou, Anastassia and Rodriguez, Jose Garcia and Orts-Escolano, Sergio and Gupta, Gaurav and Psarrou, Alexandra} } -
Rangel, Jose Carlos and Martinez-Gomez, Jesus and Garcia-Varea, Ismael and Cazorla, Miguel. LexToMap: Lexical-based Topological Mapping. Advanced Robotics (2016).
DOI:
[ BibTeX ]
@article{Rangel2016b, author = {Rangel, Jose Carlos and Martinez-Gomez, Jesus and Garcia-Varea, Ismael and Cazorla, Miguel}, doi = {}, journal = {Advanced Robotics}, number = {}, pages = {}, title = {LexToMap: Lexical-based Topological Mapping}, volume = {Accepted}, year = {2016} }
2015
-
Perez, Jose Antonio Serra. Algoritmos Bioinspirados para Visión Artificial: Aplicaciones a Reconstrucción de Objetos 3D y de Interacción Hombre-Máquina. (2015).
[ BibTeX ]
@phdthesis{Serra2015Thesis, author = {Perez, Jose Antonio Serra}, title = {Algoritmos Bioinspirados para Visión Artificial: Aplicaciones a Reconstrucción de Objetos 3D y de Interacción Hombre-Máquina}, school = {Polytechnic University College}, year = {2015}, month = jun } -
. Using Robots and Animals as Motivational Tools in ICT Courses. IEEE Revista Iberoamericana de Technologias del Aprendizaje (2015).
DOI: 10.1109/RITA.2015.2391391
[ BibTeX ]
@article{juanfelipe2015, author = {}, title = {Using Robots and Animals as Motivational Tools in ICT Courses}, journal = {IEEE Revista Iberoamericana de Technologias del Aprendizaje}, year = {2015}, doi = {10.1109/RITA.2015.2391391}, publisher = {IEEE} } -
Martín, Francisco and Agüero, Carlos and Cañas, José María. Active Visual Perception for Humanoid Robots . International Journal of Humanoid Robotics (2015).
DOI: http://dx.doi.org/10.1142/S0219843615500097
[ BibTeX ] [ URL ]
@article{Martin2015, title = {Active Visual Perception for Humanoid Robots }, journal = {International Journal of Humanoid Robotics}, volume = {12}, number = {1}, pages = {1-22}, year = {2015}, note = {}, issn = {0219-8436}, doi = {http://dx.doi.org/10.1142/S0219843615500097}, url = {http://www.worldscientific.com/doi/abs/10.1142/S0219843615500097}, author = {Martín, Francisco and Agüero, Carlos and Cañas, José María} } -
Orts-Escolano, S. and Garcia-Rodriguez, J. and Serra-Perez, J.A. and Jimeno-Morenilla, A. and Garcia-Garcia, A. and Morell, V. and Cazorla, Miguel. 3D Model Reconstruction using Neural Gas Accelerated on GPUs. Applied Soft Computing (2015).
[ BibTeX ]
@article{Orts2015, title = {3D Model Reconstruction using Neural Gas Accelerated on GPUs}, journal = {Applied Soft Computing}, volume = {32}, pages = {87–100}, year = {2015}, issn = {1568-4946}, author = {Orts-Escolano, S. and Garcia-Rodriguez, J. and Serra-Perez, J.A. and Jimeno-Morenilla, A. and Garcia-Garcia, A. and Morell, V. and Cazorla, Miguel} } -
Gil, David and Garcia-Rodriguez, Jose and Cazorla, Miguel and Johnsson, Magnus. SARASOM: A Supervised Architecture based on the Recurrent Associative SOM. Neural Computing and Applications (2015).
DOI: 10.1007/s00521-014-1785-8
[ BibTeX ]
@article{Gil2015, title = {SARASOM: A Supervised Architecture based on the Recurrent Associative SOM}, journal = {Neural Computing and Applications}, year = {2015}, doi = {10.1007/s00521-014-1785-8}, author = {Gil, David and Garcia-Rodriguez, Jose and Cazorla, Miguel and Johnsson, Magnus} } -
Angelopoulou, Anastassia and Psarrou, Alexandra and Garcia-Rodriguez, Jose and Orts-Escolano, Sergio and Azorin-Lopez, Jorge and Revett, Kenneth. 3D Reconstruction of Medical Images from Slices Automatically Landmarked with Growing Neural Models. Neurocomputing (2015).
DOI: 10.1016/j.neucom.2014.03.078
[ BibTeX ]
@article{Angelopouloul2015, title = {3D Reconstruction of Medical Images from Slices Automatically Landmarked with Growing Neural Models}, journal = {Neurocomputing}, year = {2015}, doi = {10.1016/j.neucom.2014.03.078}, author = {Angelopoulou, Anastassia and Psarrou, Alexandra and Garcia-Rodriguez, Jose and Orts-Escolano, Sergio and Azorin-Lopez, Jorge and Revett, Kenneth} } -
Azorín, Jorge and Saval, Marcelo and Fuster, Andrés and Garcia-Rodriguez, Jose. Three-dimensional planar model estimation using multi-constraint knowledge based on k-means and RANSAC. Applied Soft Computing (2015).
DOI: 10.1016/j.asoc.2015.05.007
[ BibTeX ]
@article{Azorin2015, title = {Three-dimensional planar model estimation using multi-constraint knowledge based on k-means and RANSAC}, journal = {Applied Soft Computing}, year = {2015}, doi = {10.1016/j.asoc.2015.05.007}, author = {Azorín, Jorge and Saval, Marcelo and Fuster, Andrés and Garcia-Rodriguez, Jose} } -
Rangel, J.C. and Morell, V. and Cazorla, M. and Orts-Escolano, S. and Garcia-Rodriguez, J.. Using GNG on 3D Object Recognition in Noisy RGB-D data. Neural Networks (IJCNN), The 2015 International Joint Conference on (2015).
[ BibTeX ]
@inproceedings{Rangel2015IJCNN, author = {Rangel, J.C. and Morell, V. and Cazorla, M. and Orts-Escolano, S. and Garcia-Rodriguez, J.}, booktitle = {Neural Networks (IJCNN), The 2015 International Joint Conference on}, title = {Using GNG on 3D Object Recognition in Noisy RGB-D data}, year = {2015} } -
Orts-Escolano, S. and Garcia-Rodriguez, J. and Morell, V. and Cazorla, M. and Saval-Calvo, M. and Azorin, J.. Processing Point Cloud Sequences with Growing Neural Gas. Neural Networks (IJCNN), The 2015 International Joint Conference on (2015).
[ BibTeX ]
@inproceedings{Orts2015IJCNN, author = {Orts-Escolano, S. and Garcia-Rodriguez, J. and Morell, V. and Cazorla, M. and Saval-Calvo, M. and Azorin, J.}, booktitle = {Neural Networks (IJCNN), The 2015 International Joint Conference on}, title = {Processing Point Cloud Sequences with Growing Neural Gas}, year = {2015} } -
Saval-Calvo, Marcelo and Orts-Escolano, Sergio and Azorin-Lopez, Jorge and Garcia-Rodriguez, Jose and Fuster-Guillo, Andres and Morell-Gimenez, Vicente and Cazorla, Miguel. Non-rigid point set registration using color and data downsampling. Neural Networks (IJCNN), The 2015 International Joint Conference on (2015).
[ BibTeX ]
@inproceedings{Orts2015IJCNO, author = {Saval-Calvo, Marcelo and Orts-Escolano, Sergio and Azorin-Lopez, Jorge and Garcia-Rodriguez, Jose and Fuster-Guillo, Andres and Morell-Gimenez, Vicente and Cazorla, Miguel}, booktitle = {Neural Networks (IJCNN), The 2015 International Joint Conference on}, title = {Non-rigid point set registration using color and data downsampling}, year = {2015} } -
Orts Escolano, S. and Garcia-Rodriguez, J. and Morell, V. and Cazorla, M. and Garcia-Garcia, A. and Ovidiu-Oprea, S.. Object recognition in noisy RGB-D data. 6th International Work-Conference on the Interplay between Natural and Artificial Computation (2015).
[ BibTeX ]
@inproceedings{Rangel2015IWINNAC, author = {Orts Escolano, S. and Garcia-Rodriguez, J. and Morell, V. and Cazorla, M. and Garcia-Garcia, A. and Ovidiu-Oprea, S.}, booktitle = {6th International Work-Conference on the Interplay between Natural and Artificial Computation}, title = {Object recognition in noisy RGB-D data}, year = {2015} } -
Rangel, J.C. and Morell, V. and Cazorla, M. and Orts-Escolano, S. and Garcia-Rodriguez, J.. Optimized Representation of 3D Sequences using Neural Networks. 6th International Work-Conference on the Interplay between Natural and Artificial Computation (2015).
[ BibTeX ]
@inproceedings{Orts2015IWINNAC, author = {Rangel, J.C. and Morell, V. and Cazorla, M. and Orts-Escolano, S. and Garcia-Rodriguez, J.}, booktitle = {6th International Work-Conference on the Interplay between Natural and Artificial Computation}, title = {Optimized Representation of 3D Sequences using Neural Networks}, year = {2015} } -
Jimeno, Antonio and Rodríguez, José García and Orts, Sergio and Davia., Miguel. GNG based foot reconstruction for custom footwear manufacturing. Computers in Industry (2015).
DOI:
[ BibTeX ]
@article{Jimeno2015, title = {GNG based foot reconstruction for custom footwear manufacturing}, journal = {Computers in Industry}, volume = {}, number = {}, pages = {}, year = {2015}, note = {}, doi = {}, author = {Jimeno, Antonio and Rodríguez, José García and Orts, Sergio and Davia., Miguel} } -
Martinez-Gomez, Jesus and Cazorla, Miguel and Garcia-Varea, Ismael and Morell, Vicente. ViDRILO: The Visual and Depth Robot Indoor Localization with Objects information dataset. International Journal of Robotics Research (2015).
[ BibTeX ]
@article{Martinez2015Ijrr, title = {ViDRILO: The Visual and Depth Robot Indoor Localization with Objects information dataset}, journal = {International Journal of Robotics Research}, volume = {34}, number = {14}, pages = {1681-1687}, year = {2015}, author = {Martinez-Gomez, Jesus and Cazorla, Miguel and Garcia-Varea, Ismael and Morell, Vicente} } -
Gomez, J. and Caputo, B. and Cazorla, M. and Christensen, H. and Fornoni, M. and Garcia-Varea, I. and Pronobis, A.. Where Are We After Five Editions?: Robot Vision Challenge, a Competition that Evaluates Solutions for the Visual Place Classification Problem. Robotics Automation Magazine, IEEE (2015).
DOI: 10.1109/MRA.2015.2460931
[ BibTeX ]
@article{7349126, author = {Gomez, J. and Caputo, B. and Cazorla, M. and Christensen, H. and Fornoni, M. and Garcia-Varea, I. and Pronobis, A.}, journal = {Robotics Automation Magazine, IEEE}, title = {Where Are We After Five Editions?: Robot Vision Challenge, a Competition that Evaluates Solutions for the Visual Place Classification Problem}, year = {2015}, volume = {22}, number = {4}, pages = {147-156}, doi = {10.1109/MRA.2015.2460931}, issn = {1070-9932}, month = dec } -
Rangel, Jose Carlos and Cazorla, Miguel and Varea, Ismael Garcia and Martinez-Gomez, Jesus and Fromont, Elisa and Sebban, Marc. Computing Image Descriptors from Annotations Acquired from External Tools. 2nd Iberian robotics conference (2015).
[ BibTeX ]
@inproceedings{RangelRobot2015, author = {Rangel, Jose Carlos and Cazorla, Miguel and Varea, Ismael Garcia and Martinez-Gomez, Jesus and Fromont, Elisa and Sebban, Marc}, booktitle = {2nd Iberian robotics conference}, title = {Computing Image Descriptors from Annotations Acquired from External Tools}, year = {2015} } -
Martinez-Gomez, Jesus and Cazorla, Miguel and Garcia-Varea, Ismael and Romero-Gonzalez, Cristina. Object categorization from RGB-D local features and Bag Of Words. 2nd Iberian robotics conference (2015).
[ BibTeX ]
@inproceedings{MartinezRobot2015, author = {Martinez-Gomez, Jesus and Cazorla, Miguel and Garcia-Varea, Ismael and Romero-Gonzalez, Cristina}, booktitle = {2nd Iberian robotics conference}, title = {Object categorization from RGB-D local features and Bag Of Words}, year = {2015} } -
Cazorla, Miguel and García-Rodríguez, José and Plaza, José María Cañas and Varea, Ismael García and Matellán, Vicente and Rico, Francisco Martín and Martínez-Gómez, Jesús and Lera, Francisco Javier Rodríguez and Mejias, Cristina Suarez and Sahuquillo, Maria Encarnación Martínez. SIRMAVED: Development of a comprehensive robotic system for monitoring and interaction for people with acquired brain damage and dependent people. XVI Conferencia de la Asociación Española para la Inteligencia Artificial (CAEPIA) (2015).
[ BibTeX ]
@inproceedings{Cazorla2015Caepia1, author = {Cazorla, Miguel and Garc\'{i}a-Rodr\'{i}guez, Jos\'{e} and Plaza, Jos\'{e} Mar\'{i}a Ca\~{n}as and Varea, Ismael Garc\'{i}a and Matell\'{a}n, Vicente and Rico, Francisco Mart\'{i}n and Mart\'{i}nez-G\'{o}mez, Jes\'{u}s and Lera, Francisco Javier Rodr\'{i}guez and Mejias, Cristina Suarez and Sahuquillo, Maria Encarnaci\'{o}n Mart\'{i}nez}, booktitle = {XVI Conferencia de la Asociación Española para la Inteligencia Artificial (CAEPIA)}, title = {SIRMAVED: Development of a comprehensive robotic system for monitoring and interaction for people with acquired brain damage and dependent people}, year = {2015} } -
Bojo, Javier Montoyo. Estudio y mejora de métodos de registro 3D: aceleración sobre unidades de procesamiento gráfico y caracterización del espacio de transformaciones iniciales.. (2015).
[ BibTeX ]
@phdthesis{Montoyo2015Thesis, author = {Bojo, Javier Montoyo}, title = {Estudio y mejora de métodos de registro 3D: aceleración sobre unidades de procesamiento gráfico y caracterización del espacio de transformaciones iniciales.}, school = {Polytechnic University College}, year = {2015}, month = nov } -
Donoso, Francisco Gomez and Cazorla, Miguel. Recognizing Schaeffer’s Gestures for Robot Interaction. Conferencia de la Asociación Española para la Inteligencia Artificial (CAEPIA) (2015).
[ BibTeX ] [ URL ]
@article{Gomez2015, title = {Recognizing {Schaeffer's} Gestures for Robot Interaction}, booktitle = {Conferencia de la Asociaci{\'o}n Espa{\~n}ola para la Inteligencia Artificial (CAEPIA)}, year = {2015}, url = {http://simd.albacete.org/actascaepia15/papers/01045.pdf}, author = {Donoso, Francisco Gomez and Cazorla, Miguel} }
2014
-
Morell, Vicente. Contributions to 3D data processing. (2014).
[ BibTeX ]
@phdthesis{Morell2014Thesis, author = {Morell, Vicente}, title = {Contributions to 3D data processing}, school = {Polytechnic University College}, year = {2014}, month = oct, note = {European Mention} } -
Escolano, Sergio Orts. A three-dimensional representation method for noisy point clouds based on growing self-organizing maps accelerated on GPUs. (2014).
[ BibTeX ]
@phdthesis{Orts2014Thesis, author = {Escolano, Sergio Orts}, title = {A three-dimensional representation method for noisy point clouds based on growing self-organizing maps accelerated on GPUs}, school = {Polytechnic University College}, year = {2014}, month = jan, note = {European Mention} } -
Morell, Vicente and Orts, Sergio and Cazorla, Miguel and Garcia-Rodriguez, Jose. Geometric 3D point cloud compression . Pattern Recognition Letters (2014).
DOI: http://dx.doi.org/10.1016/j.patrec.2014.05.016
[ BibTeX ] [ URL ]
@article{Morell2014, title = {Geometric 3D point cloud compression }, journal = {Pattern Recognition Letters }, volume = {50}, number = {0}, pages = {55-62}, year = {2014}, note = {}, issn = {0167-8655}, doi = {http://dx.doi.org/10.1016/j.patrec.2014.05.016}, url = {http://www.sciencedirect.com/science/article/pii/S016786551400172X}, author = {Morell, Vicente and Orts, Sergio and Cazorla, Miguel and Garcia-Rodriguez, Jose}, keywords = {Kinect } } -
Vicente Morell, Miguel Cazorla, Sergio Orts-Escolano and Garcı́a-Rodrı́guez, José. 3D Maps Representation Using GNG. Mathematical Problems in Engineering (2014).
[ BibTeX ]
@article{Morell20143Dmpe, author = {Vicente Morell, Miguel Cazorla, Sergio Orts-Escolano and Garc{\'\i}a-Rodr{\'\i}guez, Jos{\'e}}, journal = {Mathematical Problems in Engineering }, title = {3D Maps Representation Using GNG}, volume = {2014}, year = {2014} } -
Orts-Escolano, Sergio and Garcia-Rodriguez, Jose and Morella, Vicente and Cazorla, Miguel and Garcia-Chamizo, Juan Manuel. 3D Colour Object Reconstruction based on Growing Neural Gas. Neural Networks (IJCNN), The 2014 International Joint Conference on (2014).
[ BibTeX ]
@inproceedings{Orts20143d, author = {Orts-Escolano, Sergio and Garcia-Rodriguez, Jose and Morella, Vicente and Cazorla, Miguel and Garcia-Chamizo, Juan Manuel}, booktitle = {Neural Networks (IJCNN), The 2014 International Joint Conference on}, title = {3D Colour Object Reconstruction based on Growing Neural Gas}, year = {2014} } -
Morell, Vicente and Cazorla, Miguel and Orts–Escolano, Sergio and Garcia-Rodriguez, Jose. 3D Maps Representation using GNG. Neural Networks (IJCNN), The 2014 International Joint Conference on (2014).
[ BibTeX ]
@inproceedings{Morell20143d, author = {Morell, Vicente and Cazorla, Miguel and Orts--Escolano, Sergio and Garcia-Rodriguez, Jose}, booktitle = {Neural Networks (IJCNN), The 2014 International Joint Conference on}, title = {3D Maps Representation using GNG}, year = {2014} } -
Orts-Escolano, Sergio and Garcia-Rodriguez, Jose and Morell, Vicente and Cazorla, Miguel and Azorin, Jorge and Garcia-Chamizo, Juan Manuel. Parallel Computational Intelligence-Based Multi-Camera Surveillance System. Journal of Sensor and Actuator Networks (2014).
DOI: 10.3390/jsan3020095
[ BibTeX ] [ URL ]
@article{jsan3020095, author = {Orts-Escolano, Sergio and Garcia-Rodriguez, Jose and Morell, Vicente and Cazorla, Miguel and Azorin, Jorge and Garcia-Chamizo, Juan Manuel}, doi = {10.3390/jsan3020095}, issn = {2224-2708}, journal = {Journal of Sensor and Actuator Networks}, number = {2}, pages = {95--112}, title = {Parallel Computational Intelligence-Based Multi-Camera Surveillance System}, url = {http://www.mdpi.com/2224-2708/3/2/95}, volume = {3}, year = {2014} } -
Morell-Gimenez, Vicente and Saval-Calvo, Marcelo and Azorin-Lopez, Jorge and Garcia-Rodriguez, Jose and Cazorla, Miguel and Orts-Escolano, Sergio and Fuster-Guillo, Andres. A Comparative Study of Registration Methods for RGB-D Video of Static Scenes. Sensors (2014).
DOI: 10.3390/s140508547
[ BibTeX ] [ URL ]
@article{morell2014comparative, author = {Morell-Gimenez, Vicente and Saval-Calvo, Marcelo and Azorin-Lopez, Jorge and Garcia-Rodriguez, Jose and Cazorla, Miguel and Orts-Escolano, Sergio and Fuster-Guillo, Andres}, doi = {10.3390/s140508547}, issn = {1424-8220}, journal = {Sensors}, month = may, number = {5}, pages = {8547--8576}, publisher = {Multidisciplinary Digital Publishing Institute}, pubmedid = {24834909}, title = {A Comparative Study of Registration Methods for RGB-D Video of Static Scenes}, url = {http://www.mdpi.com/1424-8220/14/5/8547}, volume = {14}, year = {2014} } -
Viejo, Diego and Garcia-Rodriguez, Jose and Cazorla, Miguel. Combining Visual Features and Growing Neural Gas Networks for Robotic 3D SLAM. Information Sciences (2014).
[ BibTeX ]
@article{viejo2014combining, author = {Viejo, Diego and Garcia-Rodriguez, Jose and Cazorla, Miguel}, journal = {Information Sciences}, pages = {174--185}, title = {Combining Visual Features and Growing Neural Gas Networks for Robotic 3D SLAM}, volume = {276}, year = {2014} } -
Montoyo, Javier and Morell, Vicente and Cazorla, Miguel and Garcia-Rodriguez, Jose and Orts-Escolano, Sergio. Registration methods for RGB-D cameras accelerated on GPUs. International symposium on robotics, ISR (2014).
[ BibTeX ]
@inproceedings{Montoyo20143Registration, author = {Montoyo, Javier and Morell, Vicente and Cazorla, Miguel and Garcia-Rodriguez, Jose and Orts-Escolano, Sergio}, booktitle = {International symposium on robotics, ISR}, title = {Registration methods for RGB-D cameras accelerated on GPUs}, year = {2014} } -
Garcia-Rodriguez, Jose and Orts-Escolano, Sergio and Angelopoulou, Anastassia and Psarrou, Alexandra and Azorin-Lopez, Jorge and Garcia-Chamizo, JuanManuel. Real time motion estimation using a neural architecture implemented
on GPUs. Journal of Real-Time Image Processing (2014).
DOI: 10.1007/s11554-014-0417-y
[ BibTeX ] [ URL ]
@article{Orts-Escolano:2013aa, author = {Garcia-Rodriguez, Jose and Orts-Escolano, Sergio and Angelopoulou, Anastassia and Psarrou, Alexandra and Azorin-Lopez, Jorge and Garcia-Chamizo, JuanManuel}, title = {Real time motion estimation using a neural architecture implemented on GPUs}, journal = {Journal of Real-Time Image Processing}, year = {2014}, pages = {1-19}, doi = {10.1007/s11554-014-0417-y}, issn = {1861-8200}, publisher = {Springer Berlin Heidelberg}, url = {http://dx.doi.org/10.1007/s11554-014-0417-y} }